Lesson9 神经网络学习
9-1 代价函数
还记的在逻辑回归中的分类问题,对进行0 1,这样的简单分类是容易解决的。可是如果是0 1 2 3 4 这样的分类讲是非常痛苦的。但是这些在神经网络中的处理确容易了许多。基于神经网络的代价函数如下:

K: 表示K类的数量。例如 0 1 2 3 那么就是4
逻辑回归函数
所以,这个公式与逻辑回归的代价函数进行对比.其实,仅仅是多了K个分类的处理。加入正规化的最终的函数如下:

在逻辑回归中最后一项是所有θ的平方和,在这里也是同样的。
L: 表示层数
i,j: 对应于每一层的每个Θ的下角标
代价函数的向量化
代价函数如下:
那么,在进行计算的时候,需要进行向量化,推导结果如下:
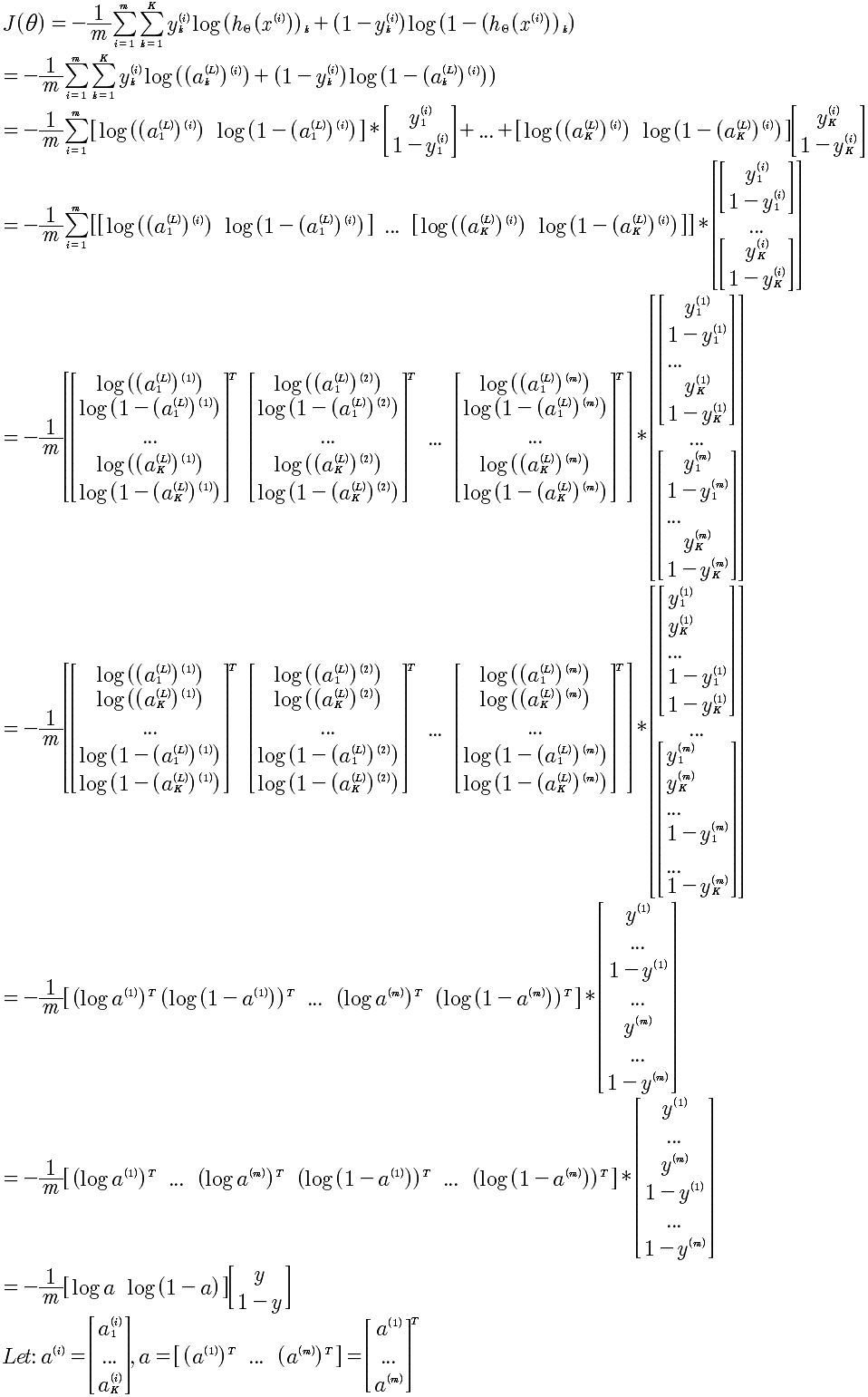
引入正规化λ的计算项是,所有的θ的平方,那么就是将Θ按照行展开,然后进行点乘计算即可。

代价函数的计算
将每一层的a^(l) 计算出来。带入J(Θ)即可。
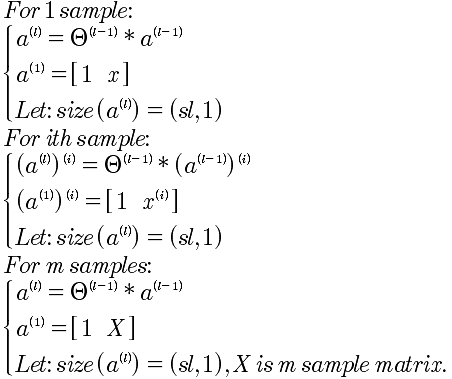
正规化λ项的计算,只需要将Θ展开成行向量,使用点乘即可。
y的向量化
在给出的分类数据中y∈[1, 2, 3, ..., 10] 这样给出的每一条数据,而在代价函数中我们需要的是yk = [0 0 0 1 ... 0] 这种向量表述,也就是对于每一个y都要进行这种向量化转换。
y=1, [1 0 0 0 0 ... 0]
y=2, [0 1 .... 0]
...
那么这种是如何计算呢?对于Octave来说计算步骤如下:
1 先生成一个标准的循环向量。例如:Y1 = [1 2 3 ... 10 1 2 ... 10 ...] 从1 到 10,一共有length(y)个
2 将y进行扩展和上面的Y1一样的维度,就是 Y2 = y .* [1 1 ... 1]
3 Y = (Y1 == Y2) 就是所要的矩阵
y∈{1, 2, 3, 4, 5},计算分类y的Octave代码如下:
y = [ 1, 2, 3, 3, 5]
Y1 = [];
Y2 = [];
for i = 1: length(y)
yy = y(i) * [1, 1, 1, 1, 1];
Y1 = [Y1, yy];
Y2 = [Y2, [1 2 3 4 5]];
end
Y1
Y2
Y = (Y1 == Y2)
输出结果:
y = 1 2 3 3 5
Y1 = 1 1 1 1 1 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 5 5 5 5 5
Y2 = 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5
Y = 1 0 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 1
9-2 反向传播算法
要搞清楚反向传播算法,先看看向前传播算法的计算过程。如下图:
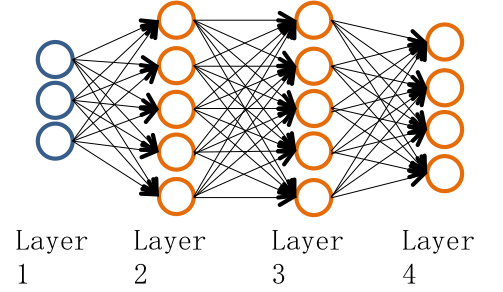
推导过程如下:
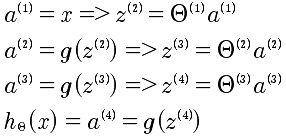
现在的问题是有了代价函数我们需要计算J(θ)的偏导数。正向计算太难了,于是使用了反向传播算法。
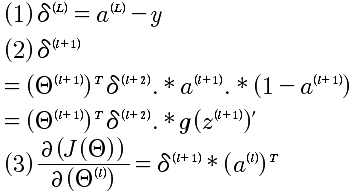
反向传播算法:
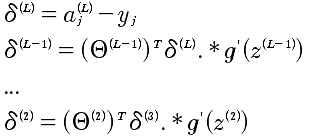
具体的计算梯度下降的偏导如下:
9-3 反向传播算法的解释
对delta来说,其实就是表示的偏差,那么所以就是使用偏微分即可表示。
另外,如果从正向的传播去思考反向传播也是可以的。因为i层的delta偏差,传递给i+1层是分散的。

这样理解和推导也是可以的。
反向传播算法完全解析
符号定义:
l: 层序号,从1开始
sl: 第 l 层的激励项数目
sl+1: 第 l+1 层的激励项数目,而并非是(sl) + 1 的意思,而仅仅是下标的表示
sl+2: 第 l+2 层的激励项数目
δ: 表示的误差
本质上就是计算  ,那么就直接从这个入手记性推导.
,那么就直接从这个入手记性推导.

J, a, z, Θ,之间是存在函数关系的,如下描述:

所以,能够有上面的J和Θ的复合函数的连续求偏导。下面就是逐个求解,从易到难:
第一步:
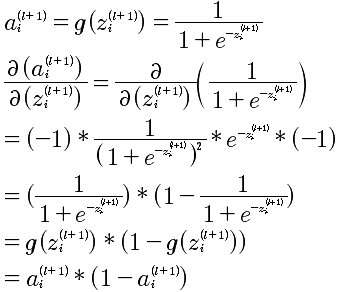
第二步:
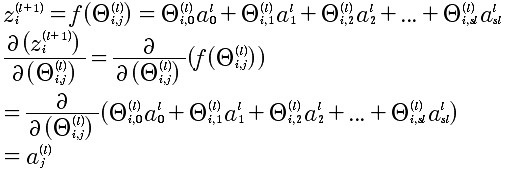
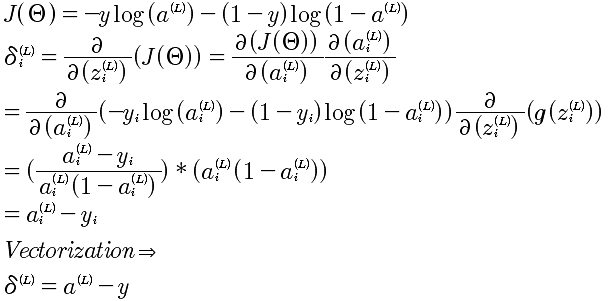
第三步 也是最难的:

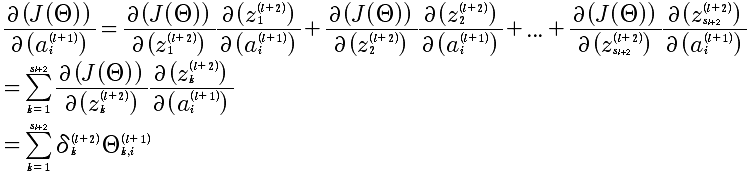
最后的计算结果如下:
上面计算的是 l+1层中第i个δ,对于第l+1层的所有δ^(l)的向量化表示:

注意:这个表达式,就是NG在课程中直接给出的结论。这里给出了推导。
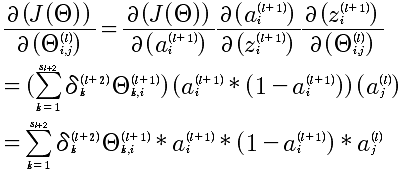
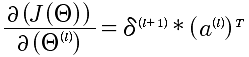
最终的表述,J对l层所有Θ的求导,结论为:
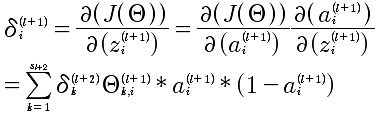
到这里,已经给出了J对Θ的偏导的计算方法。如果计算发现还有问题,那就是当l=L,第L+1层是不存在的,所以δ^(L) 是需要计算出来的,不然是没有办法推导计算的。对于δ^(L)的计算就相对来说,简单很多,因为最后一层可以直接和J(Θ)建立起函数关系,直接求导即可。
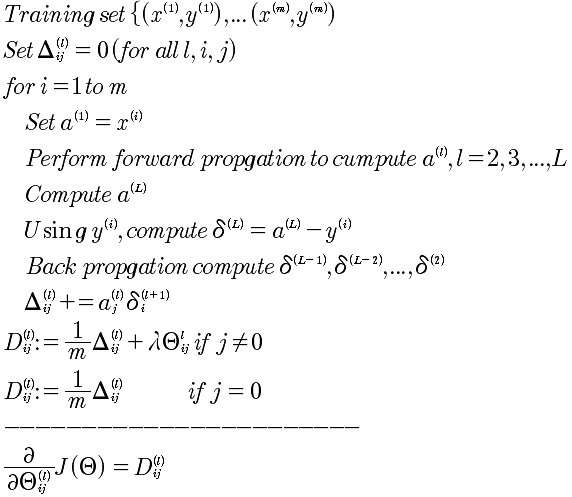
所以,综合以上所有推导,针对一个样本的反向传播算法如下:
9-4 辗转参数
对于每一层的Θ来说都是一个矩阵,例如 s1=10, s2=10, s3=1 那么对应的 Θ1 1011 矩阵, Θ2是1011, θ3是 1*11.
对于δ来说 δ1 是 1011 δ2是1011 δ3是 1*11
对于计算函数来说
fminunc(@costFunction, initialTheta, options)
现在的问题就是Θ变成初始化向量,现在的Θ是矩阵。
thetaVec = [ Theta1(:); Theta2(:); Tehta3(:)];
DVec = [D1(:); D2(:); D3(:)];
Theta1 = reshape(thetaVec(1:110), 10, 11);
Theta2 = reshape(thetaVec(111:220), 10, 11);
Theta3 = reshape(thetaVec(221:231), 1, 11)
9-5 梯度检验
在实现反向传播算法的时候,因为算法过于复杂所以很容易出现细节的错误,而更要命的是细节的错误你可能无法发现。于是,这时候我们需要梯度检验来帮助鉴别梯度下降。
先看看导数的计算方法,对于给定函数J(Θ),那么
d(J(θ))/d(θ) = (J(θ+ε) - J(θ-ε))/2ε
那么,上面的方法应用到J(θ),就可以用来计算偏导数了。具体的公式如下:
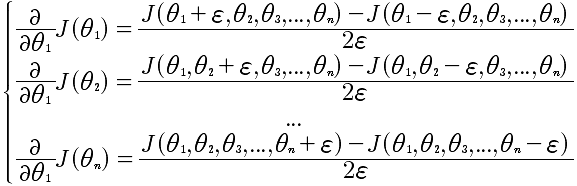
通过这个方法能计算出近似的偏导。
对于DVec来说每一个值的计算都与d(J(θ))/d(θ)比较接近或者相等才是正确的,那么用上面的简化近似算法就可以知道现在计算的Dvec是否正确的。
9-6 随机初始化
这里我们使用的Θ是随机化的初始值,不能够全部设置成0,而是通过随机化,将Θ的值设置在[-ε, +ε]之间。
Theta1 = rand(10, 11) * (2*INIT_EPSILON) - INIT_EPSILON;
Theta2 = rand(1, 11) * (2*INIT_EPSILON) - INIT_EPSILON;
9-7 放在一起
神经网络要解决几个问题,分别是输入的特征值数量和输出的分类数量,以及中间的隐藏单元。一般来说,对于中间隐藏层的数量越多会效果越好,但是计算速度会越慢。一般都是从一个隐藏层开始处理的。
训练一个神经网络的步骤如下:
1 随机初始化权重
2 实现向前传播,得到 hθ(x)对于任何一个x
3 实现代码,计算代价函数J(θ)
4 实现向后传播算法计算偏导 d(J(Θ)) / d(Θ)
for i = 1:m
执行向前和向后传播算法 得到 a以及δ
5 使用梯度检查,数学方法计算d(J(Θ)) / d(Θ) 与 向后传播算法计算的进行比对
6 使用梯度下降或者高级的向后传播来最小化J(θ)
9-8 无人车的应用
机器学习的应用。
总结
最后,总结神经网络的算法,需要从后向前推。为了求出每一层的θ,所以需要使用梯度下降来进行逐渐的逼近,求出θ;为了梯度下降算法来计算θ,那么需要计算 J(θ)的偏导;为了计算对每一层,注意是每一层的θ的偏导,需要使用反向传播来计算J(θ)的偏导;
那么,在从正向的捋顺一下,就是:
先把每一层的的所有θ随机初始化(注意是每一层),然后计算J(θ)的偏导数,最后使用梯度下降来逼近θ,求出最小的J(θ)。记着梯度的方法,就是最终的事: